2.8K
The BMA250E is an advanced, ultra-small, triaxial, low-g acceleration sensor with digital interfaces, aiming for low-power consumer electronics applications. Featuring 10 bit digital resolution, the BMA250E allows low-noise measurement of accelerations in 3 perpendicular axes.
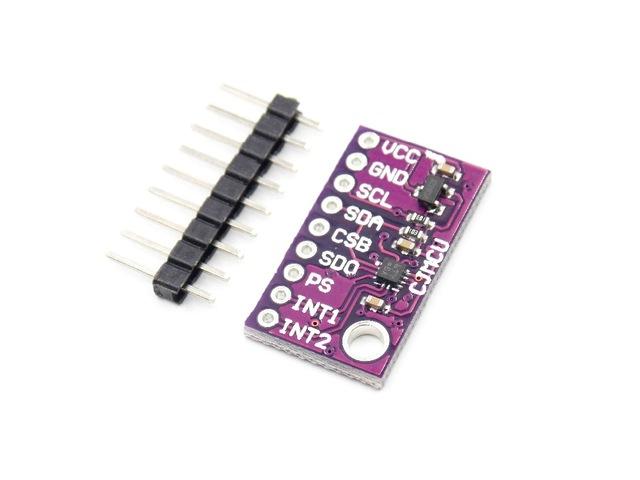
A typical module
technical Information
| Parameter | Technical data |
|---|---|
| Digital resolution | 10 bit |
| Resolution (in ±2g range) |
3.9 mg |
| Measurement ranges (programmable) |
±2 g, ±4 g, ±8 g, ±16 g |
| Sensitivity (calibrated) | ±2 g: 256 LSB/g ±4 g: 128 LSB/g ±8 g: 64 LSB/g ±16 g: 32 LSB/g |
| Zero-g offset (typ., over life-time) | ±80 mg |
| Noise density (typ.) | 400 μg/√Hz |
| Bandwidths (programmable) | 1000 Hz … 8 Hz |
| Digital inputs/outputs | SPI & I²C, 2x digital interrupt pins |
| Supply voltage (VDD) | 1.62 V … 3.6 V |
| I/0 supply voltage (VDDIO) | 1.2 V … 3.6 V |
| Temperature range | -40 … +85°C |
| Current consumption – full operation – low-power mode |
130 μA (@ 2 kHz data rate) 6.5 μA (@ 40 Hz data rate) |
| LGA package | 2 x 2 x 0.95 mm³ |
| Interrupts | – Data-ready (e. g. for processor synchronization) – Any-motion (slope) detection (e. g. for wake-up) – Tap sensing (e. g. for tap-sensitive UI control) – Orientation change recognition (e. g. for portrait/landscape switching) – Flat detection (e. g. for position sensitive switching) – Low-g / high-g detection (e. g. for shock and free-fall detection) – No-motion (e.g. for power saving) |
Connection
| Arduino | Module |
| 3.3v | Vcc |
| Gnd | Gnd |
| A4 | SDA |
| A5 | SCL |
Code
[codesyntax lang=”cpp”]
// Distributed with a free-will license.
// Use it any way you want, profit or free, provided it fits in the licenses of its associated works.
// BMA250
// This code is designed to work with the BMA250_I2CS I2C Mini Module available from ControlEverything.com.
// https://www.controleverything.com/content/Accelorometer?sku=BMA250_I2CS#tabs-0-product_tabset-2
#include <Wire.h>
// BMA250 I2C address is 0x18(24)
#define Addr 0x18
void setup()
{
// Initialise I2C communication as MASTER
Wire.begin();
// Initialise Serial Communication, set baud rate = 9600
Serial.begin(9600);
// Start I2C Transmission
Wire.beginTransmission(Addr);
// Select range selection register
Wire.write(0x0F);
// Set range +/- 2g
Wire.write(0x03);
// Stop I2C Transmission
Wire.endTransmission();
// Start I2C Transmission
Wire.beginTransmission(Addr);
// Select bandwidth register
Wire.write(0x10);
// Set bandwidth 7.81 Hz
Wire.write(0x08);
// Stop I2C Transmission
Wire.endTransmission();
delay(300);
}
void loop()
{
unsigned int data[0];
// Start I2C Transmission
Wire.beginTransmission(Addr);
// Select Data Registers (0x02 − 0x07)
Wire.write(0x02);
// Stop I2C Transmission
Wire.endTransmission();
// Request 6 bytes
Wire.requestFrom(Addr, 6);
// Read the six bytes
// xAccl lsb, xAccl msb, yAccl lsb, yAccl msb, zAccl lsb, zAccl msb
if(Wire.available() == 6)
{
data[0] = Wire.read();
data[1] = Wire.read();
data[2] = Wire.read();
data[3] = Wire.read();
data[4] = Wire.read();
data[5] = Wire.read();
}
delay(300);
// Convert the data to 10 bits
float xAccl = ((data[1] * 256.0) + (data[0] & 0xC0)) / 64;
if (xAccl > 511)
{
xAccl -= 1024;
}
float yAccl = ((data[3] * 256.0) + (data[2] & 0xC0)) / 64;
if (yAccl > 511)
{
yAccl -= 1024;
}
float zAccl = ((data[5] * 256.0) + (data[4] & 0xC0)) / 64;
if (zAccl > 511)
{
zAccl -= 1024;
}
// Output data to the serial monitor
Serial.print("Acceleration in X-Axis :");
Serial.println(xAccl);
Serial.print("Acceleration in Y-Axis :");
Serial.println(yAccl);
Serial.print("Acceleration in Z-Axis :");
Serial.println(zAccl) ;
}
[/codesyntax]
Link
